-
1 коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройств АРУ
Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы передачи с ЧРК к значению скачка уровня, вызвавшего процесс регулирования.
[ ГОСТ 22832-77]Тематики
Синонимы
EN
DE
FR
87. Коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
Коэффициент перерегулирования устройств АРУ
D. Uberregelungsgrosse
Е. Overregulation rate
F. Taux de reajustage
Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы передачи с ЧРК к значению скачка уровня, вызвавшего процесс регулирования
Источник: ГОСТ 22832-77: Аппаратура систем передачи с частотным разделением каналов. Термины и определения оригинал документа
Русско-немецкий словарь нормативно-технической терминологии > коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
-
2 коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройств АРУ
Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы передачи с ЧРК к значению скачка уровня, вызвавшего процесс регулирования.
[ ГОСТ 22832-77]Тематики
Синонимы
EN
DE
FR
87. Коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
Коэффициент перерегулирования устройств АРУ
D. Uberregelungsgrosse
Е. Overregulation rate
F. Taux de reajustage
Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы передачи с ЧРК к значению скачка уровня, вызвавшего процесс регулирования
Источник: ГОСТ 22832-77: Аппаратура систем передачи с частотным разделением каналов. Термины и определения оригинал документа
Русско-французский словарь нормативно-технической терминологии > коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
-
3 коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
коэффициент перерегулирования устройств АРУ
Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы передачи с ЧРК к значению скачка уровня, вызвавшего процесс регулирования.
[ ГОСТ 22832-77]Тематики
Синонимы
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК
-
4 режим работы
- type of operation
- state
- schedule
- run
- routine of work
- routine
- regime
- practice
- operation
- operating running regime
- operating regime
- operating mode
- operating conditions
- mode of working
- mode of operation
- mode of behaviour
- mode of behavior
- mode
- method of working
- duty
- condition
- behaviour
- behavior
- Beh
- action
- -
режим работы
-
[Интент]EN
- action
- Beh
- behavior
- behaviour
- condition
- duty
- method of working
- mode
- mode of behavior
- mode of behaviour
- mode of operation
- mode of working
- operating conditions
- operating mode
- operating regime
- operating running regime
- operation
- practice
- regime
- routine
- routine of work
- run
- schedule
- state
- type of operation
3.3.2 режим работы - наладка (machining mode): Режим работы, при котором оператор осуществляет настройку последующих производственных процессов.
Программирование, испытание и работа станка осуществляются при ручном управлении (при включенном питании).
Примечание - Этот режим работы включает, например, проверку последовательности этапов программ, измерение инструмента или детали (например, измерение детали измерительным щупом или инструментом).
3.2.2 режим работы - наладка: Режим работы, в котором оператор осуществляет настройку последующих производственных процессов.
Программирование, испытание и работа станка осуществляются в режиме ручного управления (при включенном питании).
Примечание - Режим работы станка с ЧПУ: режим работы системы ЧПУ или устройства ввода данных, при котором ввод данных рассматривается как выполняемая функция.
Для режимов работы станка с ЧПУ применяются следующие термины:
a) «Ручное управление»: Неавтоматический режим работы станка с ЧПУ, при котором оператор управляет им без применения предварительно запрограммированных числовых данных, например посредством кнопочного выключателя или джостика,
b) «Ручной ввод данных»: Программные данные в устройство ЧПУ вводятся вручную,
c) «Покадровый режим»: Режим работы станка с ЧПУ, при котором отрабатывается только один блок данных после включения режима оператором,
d) «Автоматический режим работы»: Режим работы станка с ЧПУ, при котором станок работает в автоматическом режиме в соответствии с программой, заданной системой ЧПУ, пока не будет остановлен программой или оператором.
3.51 режим работы (operating mode): Заданное условие (состояние) функционирования системы.
Источник: ГОСТ Р 54110-2010: Водородные генераторы на основе технологий переработки топлива. Часть 1. Безопасность оригинал документа
3.5.12 режим работы (mode of operation): Способ предполагаемого использования системы, связанной с безопасностью, по отношению к частоте обращений к ней; может быть:
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.9 режим работы (operating mode): Условия, при которых испытуемое оборудование выполняет свои обычные функции.
Источник: ГОСТ Р 53032-2008: Шум машин. Измерение шума оборудования для информационных технологий и телекоммуникаций оригинал документа
Русско-английский словарь нормативно-технической терминологии > режим работы
-
5 необслуживаемый режим работы в автоматическом режиме
необслуживаемый режим работы в автоматическом режиме
Функционирование радиостанции, устройства или системы без привлечения обслуживающего персонала. В задачи абонента или дежурного оператора входит лишь подготовка сообщений для передачи и обработка принятой информации, а также эпизодический контроль работающего оборудования.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > необслуживаемый режим работы в автоматическом режиме
-
6 сетевой режим работы источника бесперебойного питания
сетевой режим работы ИБП
Режим питания нагрузки (электропотребителя) энергией питающей сети. Если отклонение сетевого напряжения не превышают заданного значения, а нагрузка, не превышает максимально допустимого значения, то ИБП работает в сетевом режиме.
В этом режиме осуществляется:- фильтрация импульсных и высокочастотных сетевых помех;
- преобразование энергии переменного тока сети в энергию постоянного тока с помощью выпрямителя и схемы коррекции коэффициента мощности;
- преобразование с помощью инвертора энергии постоянного тока в энергию переменного тока со стабильными параметрами;
- подзаряд аккумуляторной батареи с помощью зарядного устройства.
[ http://www.ups-info.ru/index.php?link=160599 с изменениями]
EN
normal UPS operation
Operational state is termed Normal, when Utility Power is available and within ratings, the battery is charged, the load is within rating and it is fed from the preferred (default) source (Mains Power if Stand-By, Inverter if On-Line system).
[ http://www.upsonnet.com/UPS-Glossary/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > сетевой режим работы источника бесперебойного питания
-
7 измерительные устройства для работы в реальном масштабе времени
Русско-английский большой базовый словарь > измерительные устройства для работы в реальном масштабе времени
-
8 принудительный
1) General subject: assisted, coactive, coercive, compulsive, compulsory, forced, forcible, involuntary, mandatory, positive (о движении), preceptive, will less, will-less2) Medicine: mandatory (о лечении)3) Engineering: constrained4) Railway term: positive-acting6) Metallurgy: force7) Information technology: despotic (о режиме работы устройств в сети)8) Robots: despotic (о режиме работы устройства)9) International law: (RU-EN-RU.COM compulsory (Глоссарий к Европейской конвенции о защите прав человека)10) Makarov: coercitive, force-feed, force-feed (напр. о смазке)12) Electrical engineering: forced-feed -
9 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
10 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
11 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
12 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
13 нормальная работа
нормальная работа
Условия, при которых прибор работает в соответствии с нормальной эксплуатацией, когда прибор подсоединен к сети питания.
[ ГОСТ Р 52161. 1-2004 ( МЭК 60335-1: 2001)]EN
normal operation
conditions under which the appliance is operated in normal use when it is connected to the supply mains
[IEC 60335-1, ed. 4.0 (2001-05)]FR
conditions de fonctionnement normal
conditions dans lesquelles l'appareil est mis en fonctionnement en usage normal lorsqu’il est raccordé au réseau d'alimentation
[IEC 60335-1, ed. 4.0 (2001-05)]Тематики
EN
FR
нормальная работа (normal operation): Работа нагревательного блока после установки в здании в соответствии с инструкциями.
Источник: ГОСТ Р 52161.2.96-2006: Безопасность бытовых и аналогичных электрических приборов. Часть 2.96. Частные требования для гибких листовых нагревательных элементов для обогрева жилых помещений оригинал документа
нормальная работа (normal operation): Работа прибора, как установлено в следующих абзацах.
Примечание - Приборы, не упомянутые ниже, но которые тем не менее могут выполнять одну из функций приготовления пищи, работают, как определено для этой функции, насколько это возможно.
Источник: ГОСТ Р 52161.2.9-2006: Безопасность бытовых и аналогичных электрических приборов. Часть 2.9. Частные требования для грилей, тостеров и аналогичных переносных приборов для приготовления пищи оригинал документа
нормальная работа (normal operation): Работа прибора, как установлено в 3.1.9.101 - 3.1.9.107.
Источник: ГОСТ Р 52161.2.6-2006: Безопасность бытовых и аналогичных электрических приборов. Часть 2.6. Частные требования для стационарных кухонных плит, конфорочных панелей, духовых шкафов и аналогичных приборов оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Прибор работаете максимальным количеством воды, для которого он сконструирован, без использования детергентов или ополаскивающих средств, без посуды или столовых приборов. Если очевидно, что при загрузке прибора результаты испытаний будут иными, испытания проводят при загрузке максимальным количеством посуды и столовых приборов, установленным в инструкциях.
Примечание 101 - Посуда и столовые приборы, используемые при испытании, - по ГОСТ 30147.
Воду подают под любым давлением в пределах, установленных в инструкциях, температура воды на входе должна быть:
плюс (60 ± 5) °С или равной установленной в инструкциях (если она выше указанной) - для входных отверстий, предназначенных для подачи только горячей воды;
плюс (15 ± 5) °С - для входных отверстий, предназначенных для подачи только холодной воды.
Если прибор имеет ввод, предназначенный для подачи как холодной, так и горячей воды, температура при испытаниях должна быть наиболее неблагоприятной.
Источник: ГОСТ Р 52161.2.5-2005: Безопасность бытовых и аналогичных электрических приборов. Часть 2.5. Частные требования для посудомоечных машин оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Прибор работает при номинальном напряжении непрерывно с входным отверстием для воздуха, отрегулированным на потребляемую мощность Рт, измеренную после 20 с работы. При необходимости через 3 мин проводят окончательное регулирование отверстия.
Потребляемую мощность Ртрассчитывают по формуле
Pm = 0,5×(Pf + Pi),
где Pf - мощность, потребляемая прибором, работающим в течение 3 мин с открытым входным отверстием для воздуха, в ваттах. Любое устройство, используемое для обеспечения циркуляции охлаждающего двигатель воздуха в случае блокирования главного входного отверстия, может работать обычным образом;
Pi - мощность, потребляемая прибором, работающим в течение следующих 20 с с полностью закрытым входным отверстием, в ваттах. Любое устройство, регулируемое без помощи инструмента и используемое для обеспечения циркуляции охлаждающего двигатель воздуха в случае блокирования главного входного отверстия, должно быть отключено.
Если прибор имеет маркировку диапазона номинальных напряжений, то его включают на напряжение, равное среднему значению диапазона напряжений при условии, что разность между предельными значениями диапазона не превышает 10 % среднего значения. Если эта разность превышает 10 %, прибор включают на напряжение, равное верхнему пределу диапазона.
Измерения проводят на приборе, имеющем чистый пылесборник и фильтр, при этом емкость для воды не должна быть заполнена. Если прибор предназначен для использования только со шлангом, съемные насадки и трубки удаляют, а шланг выпрямляют. Если шланг прибора является необязательным элементом, прибор работает без шланга.
Вращающиеся щетки и аналогичные устройства при работе не должны контактировать с какой-либо поверхностью. Чистящие головки, подсоединенные с помощью шланга, при работе не должны контактировать с какой-либо поверхностью.
Выходные отверстия прибора для присоединения необязательных элементов нагружают нагрузкой сопротивления, указанной в маркировке прибора.
Источник: ГОСТ Р 52161.2.2-2005: Безопасность бытовых и аналогичных электрических приборов. Часть 2.2. Частные требования для пылесосов и водовсасывающих чистящих приборов оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Машины для обработки полов работают непрерывно, совершая возвратно-поступательные движения со скоростью 15 циклов в минуту на полированной стальной плите на расстояние 1 м. Прибор оснащен щетками для пола с твердой поверхностью в соответствии с инструкциями.
Примечание 101 - Нагрев стальной плиты не допускается. Можно использовать принудительное охлаждение, но при этом необходимо гарантировать, что циркуляция воздуха не влияет на превышение температуры, значение которого определяют.
Машины для щелочной обработки полов работают на необработанных гладких сосновых досках толщиной 25 мм, шириной приблизительно 100 мм, закрепленных внутри на дне металлического поддона. Машина для щелочной обработки совершает возвратно-поступательные движения со скоростью 15 циклов в минуту на расстояние 1 м.
Машины для чистки ковров шампунем работают на ковре, закрепленном внутри на дне металлического поддона, который наполнен водой до уровня приблизительно 3 мм над поверхностью ковра. Ковер изготовлен из нейлоновых волокон высотой ворса приблизительно 6 мм. Машина для чистки шампунем совершает возвратно-поступательные движения со скоростью 10 циклов в минуту на расстояние 1 м.
Если машина для щелочной обработки полов или машина для чистки ковров шампунем снабжена системой распределения жидкости, поддон не заполняют водой, но систему распределения жидкости приводят в действие.
Машины для чистки драпировки шампунем работают без вращающихся щеток или аналогичных устройств, контактирующих с драпировкой или любой другой поверхностью. Всасывающие шланги располагают свободно вне прямой линии с входным отверстием. Система распределения жидкости работает с пустым резервуаром.
Источник: ГОСТ Р 52161.2.10-2005: Безопасность бытовых и аналогичных электрических приборов. Часть 2.10. Частные требования для машин для обработки полов и машин для влажной чистки оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Прибор, работающий с неглубокой кастрюлей диаметром 150 мм, которая наполнена водой на высоту не менее 25 мм, устанавливают на горячую поверхность. Если приборы поставляются с сосудами или это установлено в инструкциях, сосуды используют взамен кастрюли.
Прибор работает без кастрюли, если это условие является более неблагоприятным.
Источник: ГОСТ Р 52161.2.12-2005: Безопасность бытовых и аналогичных электрических приборов. Часть 2.12. Частные требования для мармитов и аналогичных приборов оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Прибор работает заполненный текстильным материалом массой в сухом состоянии, равной максимальной массе, установленной в инструкциях.
Текстильный материал представляет собой предварительно постиранные, подрубленные двойным швом хлопчатобумажные простыни размером приблизительно 70´70 см, удельной массой в сухом состоянии от 140 до 175 г/м2.
Текстильный материал замачивают в воде, имеющей температуру (25 ± 5) °С и массу, равную массе текстильного материала.
Если функция сушки может автоматически следовать за функцией стирки в стиральной машине, прибор не загружают отдельно. Прибор работает с максимальным количеством текстильного материала, установленным в инструкциях для комбинированного цикла стирки - сушки.
Примечание 101 - Хлопок, в котором содержание влаги не превышает 10 %, рассматривают как находящийся в сухом состоянии.
Хлопок кондиционируют 24 ч в спокойном воздухе при температуре (20 ± 2) °С, относительной влажности от 60 % до 70 % и атмосферном давлении от 860 до 1060 мбар, с содержанием воды приблизительно 7 %.
Источник: ГОСТ Р 52161.2.11-2005: Безопасность бытовых и аналогичных электрических приборов. Часть 2.11. Частные требования для барабанных сушилок оригинал документа
нормальная работа (normal operation): Работа прибора после его установки в соответствии с инструкциями и заполнения холодной водой.
Источник: ГОСТ Р 52161.2.21-2006: Безопасность бытовых и аналогичных электрических приборов. Часть 2.21. Частные требования для аккумуляционных водонагревателей оригинал документа
нормальная работа (normal operation): Работа прибора в следующих условиях.
Источник: ГОСТ Р 52161.2.24-2007: Безопасность бытовых и аналогичных электрических приборов. Часть 2.24. Частные требования к холодильным приборам, мороженицам и устройствам для производства льда оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Приборы работают без белья.
Источник: ГОСТ Р 52161.2.44-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.44. Частные требования к гладильным машинам оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Зарядные устройства батарей для зарядки батарей свинцово-кислотных аккумуляторов и другие зарядные устройства батарей, имеющие номинальный постоянный выходной ток не более 20 А, подсоединяют к цепи, как приведено на рисунке 101. Переменный резистор настраивают таким образом, чтобы ток в цепи был равен номинальному постоянному выходному току при питании зарядного устройства батарей номинальным напряжением.
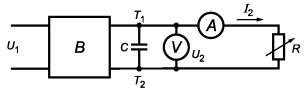
U1 - напряжение питания; U2 - выходное напряжение; I2 - выходной ток; A - амперметр; В - зарядное устройство батарей; V - вольтметр; R - переменный резистор;

где Ir - номинальный постоянный выходной ток, А;
р - коэффициент (для однополупериодного выпрямления р = 1; для двухполупериодного выпрямления р = 2);
f - частота питающей сети, Гц;
Ur - номинальное выходное напряжение постоянного тока, В.
Примечания
1 Конденсатор может иметь емкость, отличающуюся от рассчитанной на ± 20 %.
2 Конденсатор может быть предварительно заряжен до начала работы зарядного устройства батарей.
Рисунок 101 - Цепь для испытания зарядных устройств батарей
Если зарядный ток управляет процессом зарядки батареи, то переменный резистор и конденсатор заменяют разряженной батареей соответствующего типа и максимальной емкости, указанных в инструкциях.
Другие зарядные устройства батарей подсоединяют к разряженной батарее соответствующего типа и максимальной емкости, указанных в инструкциях.
Примечание 101 - Батареи считают разряженными, если:
- плотность электролита менее 1,16 - для батарей свинцово-кислотных аккумуляторов;
- напряжение каждого элемента менее 0,9 В - для батарей никель-кадмиевых аккумуляторов.
Источник: ГОСТ Р 52161.2.29-2007: Безопасность бытовых и аналогичных электрических приборов. Часть 2.29. Частные требования для зарядных устройств батарей оригинал документа
нормальная работа (normal operation): Работа прибора в сосуде, наполненном водой, на максимальной глубине погружения.
Источник: ГОСТ Р 52161.2.74-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.74. Частные требования к переносным погружным нагревателям оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Текстильные изделия располагают на вешалках или перекладинах в соответствии с инструкциями. Текстильные изделия представляют собой предварительно выстиранные хлопчатобумажные простыни с двойным подрубочным швом размером приблизительно 700×700 мм, массой от 140 до 175 г/м2, определенной в сухом состоянии.
Четыре слоя текстильного изделия используют для приборов, имеющих нагреваемую поверхность, на которую для высушивания помещают текстильное изделие. Один слой используют для приборов, в которых текстильное изделие высушивается потоком теплого воздуха.
Примечание 101 - В случае возникновения сомнений хлопчатобумажные простыни подвергают кондиционированию в течение не менее 24 ч при температуре (20 ± 5) °С и относительной влажности (60 ± 5) %.
Источник: ГОСТ Р 52161.2.43-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.43. Частные требования к сушилкам для одежды и перекладинам для полотенец оригинал документа
нормальная работа (normal operation): Работа прибора, постоянно подключенного к воде, поток которой отрегулирован таким образом, чтобы температура на выходе достигала максимального значения без срабатывания термовыключателя.
Источник: ГОСТ Р 52161.2.35-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.35. Частные требования к проточным водонагревателям оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях. Насос работает при нулевом давлении жидкости на входе, в режиме работы между минимальным и максимальным напором, таким образом, чтобы достигалась наибольшая потребляемая мощность.
Примечание 101 - Напор измеряют между входным и выходным отверстиями.
Источник: ГОСТ Р 52161.2.41-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.41. Частные требования к насосам оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Источник: ГОСТ Р 52161.2.23-2007: Безопасность бытовых и аналогичных электрических приборов. Часть 2.23. Частные требования для приборов по уходу за кожей и волосами оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Источник: ГОСТ Р 52161.2.32-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.32. Частные требования к массажным приборам оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Источник: ГОСТ Р 52161.2.60-2011: Безопасность бытовых и аналогичных электрических приборов. Часть 2.60. Частные требования к вихревым ваннам и вихревым ваннам для СПА-салонов оригинал документа
нормальная работа (normal operation): Работа прибора в том виде, в каком он был поставлен изготовителем, или с закороченной выходной цепью высокого напряжения в зависимости от того, что наиболее неблагоприятно.
Источник: ГОСТ Р 52161.2.65-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.65. Частные требования к приборам для очистки воздуха оригинал документа
нормальная работа (normal operation): Работа приборов при следующих условиях.
Приборы с подставкой работают на подставке, если не указано иное.
Другие приборы работают в соответствии с инструкциями, если не указано иное.
Источник: ГОСТ Р 52161.2.45-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.45. Частные требования к переносным нагревательным инструментам и аналогичным приборам оригинал документа
нормальная работа (normal operation): Работа циркуляционного насоса с давлением воды и скоростью потока, отрегулированными в установленных пределах так, чтобы достигалась максимальная потребляемая мощность.
Источник: ГОСТ Р 52161.2.51-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.51. Частные требования к стационарным циркуляционным насосам для отопительных систем и систем водоснабжения оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях:
- выходная цепь закорочена;
- решетки расположены на максимальном расстоянии, достаточном для поддержания дуги, прибор работает циклами; цикл состоит из 1 с работы и 2 с паузы;
- к решеткам подключена активная нагрузка, которая обеспечивает получение максимального тока.
Источник: ГОСТ Р 52161.2.59-2008: Безопасность бытовых и аналогичных электрических приборов. Часть 2.59. Частные требования к приборам для уничтожения насекомых оригинал документа
нормальная работа (normal operation): Работа прибора при следующих условиях.
Источник: ГОСТ Р 52161.2.17-2009: Безопасность бытовых и аналогичных электрических приборов. Часть 2.17. Частные требования к одеялам, подушкам, одежде и аналогичным гибким нагревательным приборам оригинал документа
Русско-английский словарь нормативно-технической терминологии > нормальная работа
14 амплитудно-частотная характеристика прибора СВЧ
амплитудно-частотная характеристика прибора СВЧ
амплитудно-частотная характеристика
Зависимость выходной мощности прибора СВЧ от частоты входного сигнала в заданном режиме работы.
[ ГОСТ 23769-79]Тематики
Синонимы
EN
189. Амплитудно-частотная характеристика прибора СВЧ
Амплитудно-частотная характеристика
Amplitude-frequency characteristic
-
Зависимость выходной мощности прибора СВЧ от частоты входного сигнала в заданном режиме работы
Источник: ГОСТ 23769-79: Приборы электронные и устройства защитные СВЧ. Термины, определения и буквенные обозначения оригинал документа
Русско-английский словарь нормативно-технической терминологии > амплитудно-частотная характеристика прибора СВЧ
15 распределительное устройство
распределительное устройство
Распределительным устройством (РУ) называется электроустановка, служащая для приема и распределения электроэнергии и содержащая сборные и соединительные шины, коммутационные аппараты, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[РД 34.20.185-94]
распределительное устройство
Электроустановка, предназначенная для приема и распределения электрической энергии на одном напряжении и содержащая коммутационные аппараты и соединяющие их сборные шины [секции шин], устройства управления и защиты.
Примечание. К устройствам управления относятся аппараты и связывающие их элементы обеспечивающие контроль, измерение, сигнализацию и выполнение команд.
[ ГОСТ 24291-90]
[ ГОСТ Р 53685-2009]
электрическое распределительное устройство
распределительное устройство
Устройство, предназначенное для приема и распределения электроэнергии на одном напряжении и содержащее коммутационные аппараты и соединяющие их сборные соединительные устройства.
Примечание. В состав распределительного устройства дополнительно могут входить устройства защиты и управления
[ОСТ 45.55-99]
распределительное устройство
Электроустановка, служащая для приема и распределения электроэнергии и содержащая коммутационные аппараты, сборные и соединительные шины, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]
устройство распределительное
Совокупность аппаратов и приборов для приёма и распределения электроэнергии одного напряжения, вырабатываемой электростанцией или преобразуемой подстанцией
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
switching substation
a substation which includes switchgear and usually busbars, but no power transformers
[IEV number 605-01-02]FR
poste de sectionnement
poste de coupure
poste comprenant des organes de manoeuvre et généralement des jeux de barres, à l'exclusion de transformateurs de puissance
[IEV number 605-01-02]В качестве РУ 6—10 кВ используется сборка высокого напряжения с однополюсными разъединителями и вертикальным расположением фаз одного присоединения и одна камера КСО с выключателем нагрузки и предохранителями для подключения трансформатора. Для РУ 0,4 кВ применяются сборки низкого напряжения с предохранителями и вертикальным расположением фаз одного присоединения.
На ПС применяются открытые (ОРУ), закрытые (ЗРУ) или комплектные (КРУ) распределительные устройства.
[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
В общем случае ПС и РУ являются составной частью электроустановок, которые различаются:
-
по назначению:
- генерирующие,
- преобразовательно-распределительные,
-
потребительские.
Генерирующие электроустановки служат для выработки электроэнергии, преобразовательно-распределительные электроустановки преобразуют электроэнергию в удобный для передачи и потребления вид, передают ее и распределяют между потребителями;
-
по роду тока:
- постоянного тока,
- переменного тока.
-
по напряжению:
- до 1000 В,
- выше 1000 В.
Шкала номинальных напряжений ограничена сравнительно небольшим числом стандартных значений, благодаря чему изготавливается небольшое число типоразмеров машин и оборудования, а электросети выполняются более экономичными. В установках трехфазного тока номинальным напряжением принято считать напряжение между фазами (междуфазовое напряжение). Согласно ГОСТ 29322—92 установлена следующая шкала номинальных напряжений:
для электросетей переменного тока частотой 50 Гц междуфазовое напряжение должно быть: 12, 24, 36, 42, 127, 220, 380 В; 3, 6, 10, 20, 35, 110, 150, 220, 330, 500, 750 и 1150 кВ;
для электросетей постоянного тока: 12, 24, 36, 48, 60, 110, 220, 440, 660, 825, 3000 В и выше.-
по способу присоединения к электросети ПС разделяются на:
- тупиковые (блочные),
- ответвительные (блочные),
- проходные (транзитные)
- узловые.
Тупиковые ПС получают питание по одной или двум тупиковым ВЛ.
Ответвительные ПС присоединяются ответвлением к одной или двум проходящим ВЛ с односторонним или двухсторонним питанием.
Проходные ПС включаются в рассечку одной или двух проходящих ВЛ с односторонним или двухсторонним питанием.
Узловые ПС кроме питающих имеют отходящие радиальные или транзитные ВЛ.-
по способу управления ПС могут быть:
- только с телесигнализацией,
- телеуправляемыми с телесигнализацией,
- с телесигнализацией и управлением с общеподстанционного пункта управления (ОПУ).
Подстанции оперативно обслуживаются постоянным дежурным персоналом на щите управления, дежурными на дому или оперативно-выездными бригадами (ОВБ). Ремонт ПС осуществляется специализированными выездными бригадами централизованного ремонта или местным персоналом подстанции.
В РУ напряжением до 1000 В провода, шины, аппараты, приборы и конструкции выбирают как по нормальным условиям работы (напряжению и току), так и по термическим и динамическим воздействиям токов коротких замыканий (КЗ) или предельно допустимой отключаемой мощности.
В РУ и ПС напряжением выше 1000 В расстояния между электрооборудованием, аппаратами, токоведущими частями, изоляторами, ограждениями и конструкциями устанавливаются так, чтобы при нормальном режиме работы электроустановки возникающие физические явления (температура нагрева, электрическая дуга, выброс газов, искрение и др.) не могли привести к повреждению оборудования и КЗ.[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
Several different classifications of switchgear can be made:- By the current rating.
-
By interrupting rating (maximum short circuit current that the device can safely interrupt)
- Circuit breakers can open and close on fault currents
- Load-break/Load-make switches can switch normal system load currents
- Isolators may only be operated while the circuit is dead, or the load current is very small.
-
By voltage class:
- Low voltage (less than 1,000 volts AC)
- Medium voltage (1,000–35,000 volts AC)
- High voltage (more than 35,000 volts AC)
-
By insulating medium:
-
By construction type:
- Indoor (further classified by IP (Ingress Protection) class or NEMA enclosure type)
- Outdoor
- Industrial
- Utility
- Marine
- Draw-out elements (removable without many tools)
- Fixed elements (bolted fasteners)
- Live-front
- Dead-front
- Open
- Metal-enclosed
- Metal-clad
- Metal enclosed & Metal clad
- Arc-resistant
-
By IEC degree of internal separation
- No Separation (Form 1)
- Busbars separated from functional units (Form 2a, 2b, 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from busbars (Form 2b, 3b, 4a, 4b)
- Terminals for external conductors separated from functional units but not from each other (Form 3a, 3b)
- Functional units separated from each other (Form 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from each other (Form 4a, 4b)
- Terminals for external conductors separate from their associated functional unit (Form 4b)
-
By interrupting device:
-
By operating method:
- Manually operated
- Motor/stored energy operated
- Solenoid operated
-
By type of current:
-
By application:
-
By purpose
- Isolating switches (disconnectors)
- Load-break switches.
- Grounding (earthing) switches
A single line-up may incorporate several different types of devices, for example, air-insulated bus, vacuum circuit breakers, and manually operated switches may all exist in the same row of cubicles.
Ratings, design, specifications and details of switchgear are set by a multitude of standards. In North America mostly IEEE and ANSI standards are used, much of the rest of the world uses IEC standards, sometimes with local national derivatives or variations.
[Robert W. Smeaton (ed) Switchgear and Control Handbook 3rd Ed., Mc Graw Hill, new York 1997]
[ http://en.wikipedia.org/wiki/High_voltage_switchgear]Тематики
- электрификация, электроснабж. железных дорог
- электроагрегаты генераторные
- электробезопасность
- электроснабжение в целом
Синонимы
EN
- distribution
- energy distribution board
- gear
- switch-gear
- switchboard
- switchgear
- switching substation
- switchyard
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > распределительное устройство
16 распределительное устройство
- switchyard
- switching substation
- switchgear
- switchboard
- switch-gear
- gear
- energy distribution board
- distribution
распределительное устройство
Распределительным устройством (РУ) называется электроустановка, служащая для приема и распределения электроэнергии и содержащая сборные и соединительные шины, коммутационные аппараты, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[РД 34.20.185-94]
распределительное устройство
Электроустановка, предназначенная для приема и распределения электрической энергии на одном напряжении и содержащая коммутационные аппараты и соединяющие их сборные шины [секции шин], устройства управления и защиты.
Примечание. К устройствам управления относятся аппараты и связывающие их элементы обеспечивающие контроль, измерение, сигнализацию и выполнение команд.
[ ГОСТ 24291-90]
[ ГОСТ Р 53685-2009]
электрическое распределительное устройство
распределительное устройство
Устройство, предназначенное для приема и распределения электроэнергии на одном напряжении и содержащее коммутационные аппараты и соединяющие их сборные соединительные устройства.
Примечание. В состав распределительного устройства дополнительно могут входить устройства защиты и управления
[ОСТ 45.55-99]
распределительное устройство
Электроустановка, служащая для приема и распределения электроэнергии и содержащая коммутационные аппараты, сборные и соединительные шины, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]
устройство распределительное
Совокупность аппаратов и приборов для приёма и распределения электроэнергии одного напряжения, вырабатываемой электростанцией или преобразуемой подстанцией
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
switching substation
a substation which includes switchgear and usually busbars, but no power transformers
[IEV number 605-01-02]FR
poste de sectionnement
poste de coupure
poste comprenant des organes de manoeuvre et généralement des jeux de barres, à l'exclusion de transformateurs de puissance
[IEV number 605-01-02]В качестве РУ 6—10 кВ используется сборка высокого напряжения с однополюсными разъединителями и вертикальным расположением фаз одного присоединения и одна камера КСО с выключателем нагрузки и предохранителями для подключения трансформатора. Для РУ 0,4 кВ применяются сборки низкого напряжения с предохранителями и вертикальным расположением фаз одного присоединения.
На ПС применяются открытые (ОРУ), закрытые (ЗРУ) или комплектные (КРУ) распределительные устройства.
[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
В общем случае ПС и РУ являются составной частью электроустановок, которые различаются:
-
по назначению:
- генерирующие,
- преобразовательно-распределительные,
-
потребительские.
Генерирующие электроустановки служат для выработки электроэнергии, преобразовательно-распределительные электроустановки преобразуют электроэнергию в удобный для передачи и потребления вид, передают ее и распределяют между потребителями;
-
по роду тока:
- постоянного тока,
- переменного тока.
-
по напряжению:
- до 1000 В,
- выше 1000 В.
Шкала номинальных напряжений ограничена сравнительно небольшим числом стандартных значений, благодаря чему изготавливается небольшое число типоразмеров машин и оборудования, а электросети выполняются более экономичными. В установках трехфазного тока номинальным напряжением принято считать напряжение между фазами (междуфазовое напряжение). Согласно ГОСТ 29322—92 установлена следующая шкала номинальных напряжений:
для электросетей переменного тока частотой 50 Гц междуфазовое напряжение должно быть: 12, 24, 36, 42, 127, 220, 380 В; 3, 6, 10, 20, 35, 110, 150, 220, 330, 500, 750 и 1150 кВ;
для электросетей постоянного тока: 12, 24, 36, 48, 60, 110, 220, 440, 660, 825, 3000 В и выше.-
по способу присоединения к электросети ПС разделяются на:
- тупиковые (блочные),
- ответвительные (блочные),
- проходные (транзитные)
- узловые.
Тупиковые ПС получают питание по одной или двум тупиковым ВЛ.
Ответвительные ПС присоединяются ответвлением к одной или двум проходящим ВЛ с односторонним или двухсторонним питанием.
Проходные ПС включаются в рассечку одной или двух проходящих ВЛ с односторонним или двухсторонним питанием.
Узловые ПС кроме питающих имеют отходящие радиальные или транзитные ВЛ.-
по способу управления ПС могут быть:
- только с телесигнализацией,
- телеуправляемыми с телесигнализацией,
- с телесигнализацией и управлением с общеподстанционного пункта управления (ОПУ).
Подстанции оперативно обслуживаются постоянным дежурным персоналом на щите управления, дежурными на дому или оперативно-выездными бригадами (ОВБ). Ремонт ПС осуществляется специализированными выездными бригадами централизованного ремонта или местным персоналом подстанции.
В РУ напряжением до 1000 В провода, шины, аппараты, приборы и конструкции выбирают как по нормальным условиям работы (напряжению и току), так и по термическим и динамическим воздействиям токов коротких замыканий (КЗ) или предельно допустимой отключаемой мощности.
В РУ и ПС напряжением выше 1000 В расстояния между электрооборудованием, аппаратами, токоведущими частями, изоляторами, ограждениями и конструкциями устанавливаются так, чтобы при нормальном режиме работы электроустановки возникающие физические явления (температура нагрева, электрическая дуга, выброс газов, искрение и др.) не могли привести к повреждению оборудования и КЗ.[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
Several different classifications of switchgear can be made:- By the current rating.
-
By interrupting rating (maximum short circuit current that the device can safely interrupt)
- Circuit breakers can open and close on fault currents
- Load-break/Load-make switches can switch normal system load currents
- Isolators may only be operated while the circuit is dead, or the load current is very small.
-
By voltage class:
- Low voltage (less than 1,000 volts AC)
- Medium voltage (1,000–35,000 volts AC)
- High voltage (more than 35,000 volts AC)
-
By insulating medium:
-
By construction type:
- Indoor (further classified by IP (Ingress Protection) class or NEMA enclosure type)
- Outdoor
- Industrial
- Utility
- Marine
- Draw-out elements (removable without many tools)
- Fixed elements (bolted fasteners)
- Live-front
- Dead-front
- Open
- Metal-enclosed
- Metal-clad
- Metal enclosed & Metal clad
- Arc-resistant
-
By IEC degree of internal separation
- No Separation (Form 1)
- Busbars separated from functional units (Form 2a, 2b, 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from busbars (Form 2b, 3b, 4a, 4b)
- Terminals for external conductors separated from functional units but not from each other (Form 3a, 3b)
- Functional units separated from each other (Form 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from each other (Form 4a, 4b)
- Terminals for external conductors separate from their associated functional unit (Form 4b)
-
By interrupting device:
-
By operating method:
- Manually operated
- Motor/stored energy operated
- Solenoid operated
-
By type of current:
-
By application:
-
By purpose
- Isolating switches (disconnectors)
- Load-break switches.
- Grounding (earthing) switches
A single line-up may incorporate several different types of devices, for example, air-insulated bus, vacuum circuit breakers, and manually operated switches may all exist in the same row of cubicles.
Ratings, design, specifications and details of switchgear are set by a multitude of standards. In North America mostly IEEE and ANSI standards are used, much of the rest of the world uses IEC standards, sometimes with local national derivatives or variations.
[Robert W. Smeaton (ed) Switchgear and Control Handbook 3rd Ed., Mc Graw Hill, new York 1997]
[ http://en.wikipedia.org/wiki/High_voltage_switchgear]Тематики
- электрификация, электроснабж. железных дорог
- электроагрегаты генераторные
- электробезопасность
- электроснабжение в целом
Синонимы
EN
- distribution
- energy distribution board
- gear
- switch-gear
- switchboard
- switchgear
- switching substation
- switchyard
DE
FR
Русско-английский словарь нормативно-технической терминологии > распределительное устройство
17 распределительное устройство
распределительное устройство
Распределительным устройством (РУ) называется электроустановка, служащая для приема и распределения электроэнергии и содержащая сборные и соединительные шины, коммутационные аппараты, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[РД 34.20.185-94]
распределительное устройство
Электроустановка, предназначенная для приема и распределения электрической энергии на одном напряжении и содержащая коммутационные аппараты и соединяющие их сборные шины [секции шин], устройства управления и защиты.
Примечание. К устройствам управления относятся аппараты и связывающие их элементы обеспечивающие контроль, измерение, сигнализацию и выполнение команд.
[ ГОСТ 24291-90]
[ ГОСТ Р 53685-2009]
электрическое распределительное устройство
распределительное устройство
Устройство, предназначенное для приема и распределения электроэнергии на одном напряжении и содержащее коммутационные аппараты и соединяющие их сборные соединительные устройства.
Примечание. В состав распределительного устройства дополнительно могут входить устройства защиты и управления
[ОСТ 45.55-99]
распределительное устройство
Электроустановка, служащая для приема и распределения электроэнергии и содержащая коммутационные аппараты, сборные и соединительные шины, вспомогательные устройства (компрессорные, аккумуляторные и др.), а также устройства защиты, автоматики и измерительные приборы.
[ПОТ Р М-016-2001]
[РД 153-34.0-03.150-00]
устройство распределительное
Совокупность аппаратов и приборов для приёма и распределения электроэнергии одного напряжения, вырабатываемой электростанцией или преобразуемой подстанцией
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]EN
switching substation
a substation which includes switchgear and usually busbars, but no power transformers
[IEV number 605-01-02]FR
poste de sectionnement
poste de coupure
poste comprenant des organes de manoeuvre et généralement des jeux de barres, à l'exclusion de transformateurs de puissance
[IEV number 605-01-02]В качестве РУ 6—10 кВ используется сборка высокого напряжения с однополюсными разъединителями и вертикальным расположением фаз одного присоединения и одна камера КСО с выключателем нагрузки и предохранителями для подключения трансформатора. Для РУ 0,4 кВ применяются сборки низкого напряжения с предохранителями и вертикальным расположением фаз одного присоединения.
На ПС применяются открытые (ОРУ), закрытые (ЗРУ) или комплектные (КРУ) распределительные устройства.
[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
В общем случае ПС и РУ являются составной частью электроустановок, которые различаются:
-
по назначению:
- генерирующие,
- преобразовательно-распределительные,
-
потребительские.
Генерирующие электроустановки служат для выработки электроэнергии, преобразовательно-распределительные электроустановки преобразуют электроэнергию в удобный для передачи и потребления вид, передают ее и распределяют между потребителями;
-
по роду тока:
- постоянного тока,
- переменного тока.
-
по напряжению:
- до 1000 В,
- выше 1000 В.
Шкала номинальных напряжений ограничена сравнительно небольшим числом стандартных значений, благодаря чему изготавливается небольшое число типоразмеров машин и оборудования, а электросети выполняются более экономичными. В установках трехфазного тока номинальным напряжением принято считать напряжение между фазами (междуфазовое напряжение). Согласно ГОСТ 29322—92 установлена следующая шкала номинальных напряжений:
для электросетей переменного тока частотой 50 Гц междуфазовое напряжение должно быть: 12, 24, 36, 42, 127, 220, 380 В; 3, 6, 10, 20, 35, 110, 150, 220, 330, 500, 750 и 1150 кВ;
для электросетей постоянного тока: 12, 24, 36, 48, 60, 110, 220, 440, 660, 825, 3000 В и выше.-
по способу присоединения к электросети ПС разделяются на:
- тупиковые (блочные),
- ответвительные (блочные),
- проходные (транзитные)
- узловые.
Тупиковые ПС получают питание по одной или двум тупиковым ВЛ.
Ответвительные ПС присоединяются ответвлением к одной или двум проходящим ВЛ с односторонним или двухсторонним питанием.
Проходные ПС включаются в рассечку одной или двух проходящих ВЛ с односторонним или двухсторонним питанием.
Узловые ПС кроме питающих имеют отходящие радиальные или транзитные ВЛ.-
по способу управления ПС могут быть:
- только с телесигнализацией,
- телеуправляемыми с телесигнализацией,
- с телесигнализацией и управлением с общеподстанционного пункта управления (ОПУ).
Подстанции оперативно обслуживаются постоянным дежурным персоналом на щите управления, дежурными на дому или оперативно-выездными бригадами (ОВБ). Ремонт ПС осуществляется специализированными выездными бригадами централизованного ремонта или местным персоналом подстанции.
В РУ напряжением до 1000 В провода, шины, аппараты, приборы и конструкции выбирают как по нормальным условиям работы (напряжению и току), так и по термическим и динамическим воздействиям токов коротких замыканий (КЗ) или предельно допустимой отключаемой мощности.
В РУ и ПС напряжением выше 1000 В расстояния между электрооборудованием, аппаратами, токоведущими частями, изоляторами, ограждениями и конструкциями устанавливаются так, чтобы при нормальном режиме работы электроустановки возникающие физические явления (температура нагрева, электрическая дуга, выброс газов, искрение и др.) не могли привести к повреждению оборудования и КЗ.[ http://energy-ua.com/elektricheskie-p/klassifikatsiya.html]
Several different classifications of switchgear can be made:- By the current rating.
-
By interrupting rating (maximum short circuit current that the device can safely interrupt)
- Circuit breakers can open and close on fault currents
- Load-break/Load-make switches can switch normal system load currents
- Isolators may only be operated while the circuit is dead, or the load current is very small.
-
By voltage class:
- Low voltage (less than 1,000 volts AC)
- Medium voltage (1,000–35,000 volts AC)
- High voltage (more than 35,000 volts AC)
-
By insulating medium:
-
By construction type:
- Indoor (further classified by IP (Ingress Protection) class or NEMA enclosure type)
- Outdoor
- Industrial
- Utility
- Marine
- Draw-out elements (removable without many tools)
- Fixed elements (bolted fasteners)
- Live-front
- Dead-front
- Open
- Metal-enclosed
- Metal-clad
- Metal enclosed & Metal clad
- Arc-resistant
-
By IEC degree of internal separation
- No Separation (Form 1)
- Busbars separated from functional units (Form 2a, 2b, 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from busbars (Form 2b, 3b, 4a, 4b)
- Terminals for external conductors separated from functional units but not from each other (Form 3a, 3b)
- Functional units separated from each other (Form 3a, 3b, 4a, 4b)
- Terminals for external conductors separated from each other (Form 4a, 4b)
- Terminals for external conductors separate from their associated functional unit (Form 4b)
-
By interrupting device:
-
By operating method:
- Manually operated
- Motor/stored energy operated
- Solenoid operated
-
By type of current:
-
By application:
-
By purpose
- Isolating switches (disconnectors)
- Load-break switches.
- Grounding (earthing) switches
A single line-up may incorporate several different types of devices, for example, air-insulated bus, vacuum circuit breakers, and manually operated switches may all exist in the same row of cubicles.
Ratings, design, specifications and details of switchgear are set by a multitude of standards. In North America mostly IEEE and ANSI standards are used, much of the rest of the world uses IEC standards, sometimes with local national derivatives or variations.
[Robert W. Smeaton (ed) Switchgear and Control Handbook 3rd Ed., Mc Graw Hill, new York 1997]
[ http://en.wikipedia.org/wiki/High_voltage_switchgear]Тематики
- электрификация, электроснабж. железных дорог
- электроагрегаты генераторные
- электробезопасность
- электроснабжение в целом
Синонимы
EN
- distribution
- energy distribution board
- gear
- switch-gear
- switchboard
- switchgear
- switching substation
- switchyard
DE
FR
Русско-французский словарь нормативно-технической терминологии > распределительное устройство
18 направленная токовая защита нулевой последовательности
направленная токовая защита нулевой последовательности
—
[В.А.Семенов. Англо-русский словарь по релейной защите]Нулевая последовательность фаз.
Согласно теории симметричных составляющих любую несимметричную систему трех токов или напряжений - обозначим их А, В, С - можно представить в виде трех систем прямой, обратной и нулевой последовательностей фаз (рис. 7.9, а-в). Первые две системы симметричны и уравновешены, последняя симметрична, но не уравновешена.
Система прямой последовательности (рис. 7.9, а) состоит из трех вращающихся векторов A 1, B 1, C 1, равных по значению и повернутых на 120° относительно друг друга, причем вектор B1 следует за вектором А 1.
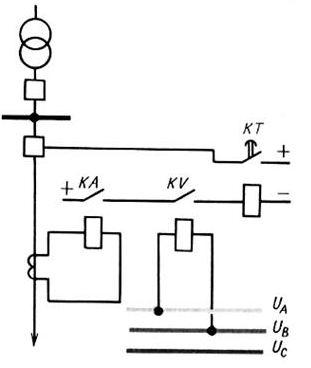
Рис. 7.8. Принципиальная схема максимальной токовой защиты с пуском от реле минимального напряжения:
КА - реле тока (токовый пусковой орган); КV - реле минимального напряжения (пусковой орган по напряжению); КТ - реле времени
Система обратной последовательности (рис. 7.9, б) состоит также из трех векторов A 2, B 2, C 2, равных по значению и повернутых на 120° относительно друг друга, но при вращении в ту же сторону, что и векторы прямой последовательности, вектор B 2 опережает вектор A 2 на 120°.
Система нулевой последовательности (рис. 7.9, в) состоит из трех векторов A 0, B 0, C 0, совпадающих по фазе.
Очевидно, что сложение одноименных векторов этих трех систем дает ту несимметричную систему, которая была разложена на, ее составляющие:

В качестве примера сложение векторов фазы С выполнено на рис. 7.9, г.
Существует и метод расчета симметричных составляющих, согласно которому составляющая нулевой последовательности
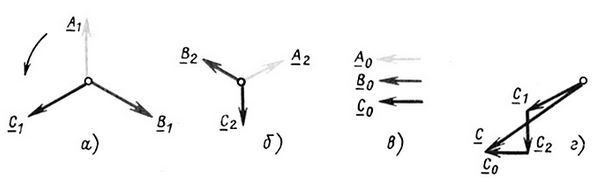
Рис. 7.9. Симметричные составляющие:
а, б, в - прямой, обратной и нулевой последовательности соответственно; г - сложение векторов трех последовательностей фазы С
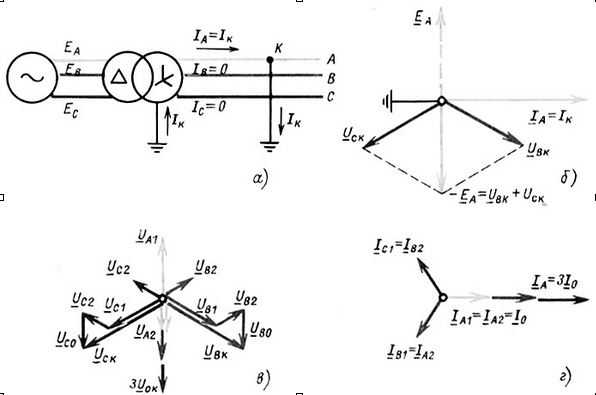
Рис. 7.10. Однофазное КЗ на землю на ненагруженной линии с односторонним питанием:
а - схема линии; б - векторная диаграмма напряжения и тока для точки К ; в, г - векторные диаграммы напряжения и токов, построенные с помощью симметричных составляющихТаким образом, для нахождения A 0 надо геометрически сложить три составляющие вектора и взять одну треть от суммы.
Целесообразность представления несимметричных систем тремя симметричными составляющими состоит в том, что анализ и расчеты напряжений и токов для системы нулевой последовательности могут выполняться независимо от систем прямой и обратной последовательностей, что во многих случаях упрощает расчеты.
Включение же защит на составляющие нулевой последовательности дает ряд преимуществ по сравнению с включением их на полные токи и напряжения фаз для действия при КЗ на землю.
Практическое использование составляющих нулевой последовательности. Рассмотрим металлическое замыкание фазы А на землю в сети с эффективно заземленной нейтралью (рис. 7.10, а). Этот вид повреждения относится к несимметричным КЗ и характеризуется тем, что в замкнутом контуре действует ЭДС E A, под действием которой в поврежденной фазе А проходит ток IA=Ik отстающий от E A на 90°; напряжение фазы А относительно земли в месте повреждения (точка К) UAк =0, так как эта точка непосредственно соединена с землей; токи в неповрежденных фазах IB и IC отсутствуют. С учетом сказанного на рис. 7.10, б построена векторная диаграмма для точки К.
На рис. 7.10, в и г приведены векторные диаграммы напряжений и токов, построенные с помощью симметричных составляющих для того же случая однофазного КЗ.
Сравнение диаграммы, представленной на рис. 7.10, б, с диаграммами рис. 7.10, в и г показывает, что вектор I к равен вектору 3I0, а –ЕА =U B к + U C к = 3U0к. Значит, полный ток фазы в месте повреждения может быть представлен утроенным значением тока нулевой последовательности, а ЭДС - ЕА - утроенным значением напряжения нулевой последовательности.
Практически ток нулевой последовательности получают соединением вторичных обмоток трансформаторов тока в фильтр токов нулевой последовательности (рис. 7.11). Из схемы видно, что ток в реле КА равен геометрической сумме токов трех фаз:

Ток в реле появляется только при однофазном или двухфазном КЗ на землю. Короткие замыкания между фазами являются симметричными системами, и соответственно этому ток в реле Iр=0.
Для получения напряжения нулевой последовательности вторичные обмотки трансформатора напряжения соединяют в разомкнутый треугольник (рис. 7.12) и обязательно заземляют нейтраль его первичной обмотки. В этом случае

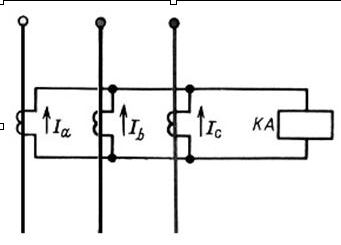
Рис. 7.11. Соединение трансформаторов тока в фильтр токов нулевой последовательности
В нормальном режиме работы и КЗ между фазами (без земли) геометрическая сумма напряжений вторичных обмоток, соединенных в разомкнутый треугольник, равна нулю, и поэтому Up также равно нулю (рис. 7.12, б). И только при однофазных (или двухфазных) КЗ на землю на зажимах разомкнутого треугольника появляется напряжение Up=3U0 (рис. 7.12, в).
Фазные напряжения систем прямой и обратной последовательностей образуют симметричные звезды, и поэтому суммы их векторов в схеме разомкнутого треугольника всегда равны нулю.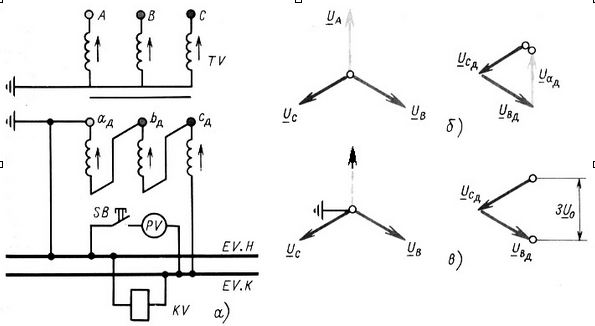
Рис. 7.12. Соединение однофазных трансформаторов напряжении в фильтр напряжения нулевой последовательности:
а - общая схема трансформатора напряжения; б - векторные диаграммы в нормальном режиме работы; с - то же при замыкании фазы А на землю в сети с заземленной нейтралью; PV - вольтметр контроля исправности цепей вторичной обмоткиВ сетях с эффективным заземлением нейтрали около 80% повреждений связано с замыканиями на землю. Для защиты оборудования применяют устройства, реагирующие на составляющие нулевой последовательности.
Схема и некоторые вопросы эксплуатации токовой направленной защиты нулевой последовательности. Принципиальная схема защиты показана на рис. 7.13. Пусковое токовое реле КА, включенное на фильтр токов нулевой последовательности, реагирует на появление КЗ на землю, когда в нулевом проводе проходит ток 3I0.
Реле мощности KW фиксирует направление мощности КЗ, обеспечивая селективность действия: защита работает при направлении мощности КЗ от шин подстанции в защищаемую линию. Напряжение 3U0 подводится к реле мощности от обмотки разомкнутого треугольника трансформатора напряжения (шинки EV, H, KV, K).
Реле времени КТ создает выдержку времени, необходимую по условию селективности.
На рис. 7.14 показано размещение токовых направленных защит нулевой последовательности в сети, работающей с заземленными нейтралями с обеих сторон рассматриваемого участка. График характеристик выдержек времени построен по встречно-ступенчатому принципу. Из графика видно, что каждая защита отстраивается от защиты смежного участка ступенью времени Δt =t1-t3.
Значение тока срабатывания пускового токового реле выбирается по условию надежного действия реле при КЗ в конце следующего (второго) участка сети, а также по условию отстройки от тока небаланса.
Появление тока небаланса в реле связано с погрешностью трансформаторов тока, неидентичностью трансформаторов тока, неидентичностью их характеристик намагничивания и имеет решающее значение. Чтобы не допустить действия пускового токового реле от тока небаланса, ток срабатывания реле принимают больше тока небаланса. Ток небаланса определяется для нормального рабочего режима или для режима трехфазного КЗ в зависимости от выдержки времени защиты.
При наличии в защищаемой сети автотрансформаторов, электрически связывающих сети двух напряжений, однофазное или двухфазное замыкание на землю к сети среднего напряжения приводит к появлению тока I0 в линиях высшего напряжения. Чтобы избежать ложных срабатываний защит линий высшего напряжения, уставки их защит по току срабатывания и выдержкам времени согласуют с уставками защит в сети среднего напряжения. По указанной причине избегают, как правило, заземления нейтралей обмоток звезд высшего и среднего напряжений у одного трансформатора. Заметим также, что у трансформатора со схемой соединения звезда-треугольник замыкание на землю на стороне треугольника не вызывает появления тока I0 на стороне звезды.
Ток I0 появляется в линиях при неполнофазных режимах работы участков сетей. Такие режимы могут быть кратковременными и длительными. От кратковременных неполнофазных режимов, возникающих, например, в цикле ОАПВ линии, а также АПВ при неодновременном включении трех фаз выключателя защиты отстраиваются по току срабатывания или выдержки времени защит принимаются больше, чем время t ОАПВ. При возможных неполнофазных режимах работы линий (например, при пофазном ремонте под напряжением) токовые направленные защиты нулевой последовательности ремонтируемой линии и смежных участков должны проверяться и отстраиваться от несимметрии или выводиться из работы, так как они мало приспособлены для работы в таких условиях.
В процессе эксплуатации токовых защит нулевой последовательности должны строго учитываться все заземленные нейтрали автотрансформаторов и трансформаторов, являющиеся как бы источниками токов нулевой последовательности. Распределение тока I0 в сети определяется исключительно расположением заземленных нейтралей, а не генераторов электростанций.
Контроль исправности цепей напряжения разомкнутого треугольника осуществляется с помощью вольтметра, периодически подключаемого с помощью кнопки SB (см. рис. 7.12). Вольтметр измеряет напряжение небаланса, имеющего значение 1-3 В. При нарушении цепей показание вольтметра пропадает.
Наряду с рассмотренной токовой направленной защитой нулевой последовательности широкое распространение в сетях 110 кВ и выше получили направленные отсечки и ступенчатые защиты пулевой последовательности. Наиболее совершенными являются четырехступенчатые защиты, первая ступень которых обычно выполняется без выдержки времени. Первая и вторая ступени защиты предназначены для действий при замыканиях на землю в пределах защищаемой линии и на шинах противоположной подстанции. Последние ступени выполняют в основном роль резервирования.
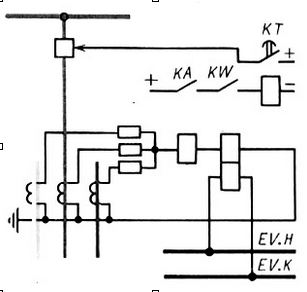
Рис. 7.13. Схема токовой направленной защиты нулевой последовательности
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-3.html]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > направленная токовая защита нулевой последовательности
19 линейно-интерактивный источник бесперебойного питания
линейно-интерактивный источник бесперебойного питания
источник бесперебойного питания с линейно-интерактивным режимом работы
-EN
line interactive UPS
A system, which energizes the load from the utility mains providing conditioned power by filtering and stabilizing mains voltage (VI class per IEC 62040-3).
Upon mains outage the load is energized from batteries via the Inverter.
[ http://www.upsonnet.com/UPS-Glossary/]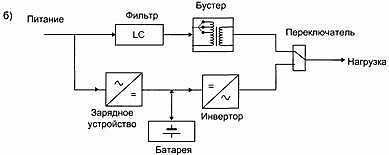
Структурная схема линейно-интерактивного ИБП
[ http://www.tcs.ru/reviews/?id=345]Исчезновение напряжения в питающей сети - явление довольно редкое.
Гораздо чаще происходят провалы или всплески напряжения, вызывающие не менее серьезные последствия в нагрузке (электроприемнике). Именно это обстоятельство послужило причиной для разработки ИБП, способных регулировать напряжение сети. Такие ИПБ получили название линейно-интерактивных.
Нетрудно заметить, что по схемотехнике линейно-интерактивные ИБП похожи на off-line ИБП. Принципиальным отличием между ними, обусловившим выделение line-interactive ИБП в отдельную группу, является наличие специального устройства (бустера), предназначенного для ступенчатой стабилизации выходного напряжения, осуществляемого путем автоматического переключения отводов трансформатора.
Линейно-интерактивные ИБП являются удачным сочетанием простоты и надежности off-line ИПБ и быстродействия on-line ИБП. Существенным отличием указанных ИБП является форма выходного напряжения в автономном (аккумуляторном) режиме работы: у off-line ИПБ - ступенчатая, а у линейно-интерактивного ИБП - синусоидальная.
Линейно-интерактивные ИБП часто используются для защиты офисной техники и серверов масштаба одного отдела.Достоинства:
- компактность,
- экономичность,
- синусоидальная форма выходного напряжения,
- ступенчатая стабилизация выходного напряжения.
Недостатки:
- отсутствие гальванической развязки нагрузки (электропотребителя) от питающей сети,
- отсутствие стабилизации частоты выходного напряжения,
- недостаточный уровень стабилизация выходного напряжения относительно номинального значения (5-7%).
[ http://www.tcs.ru/reviews/?id=345 с изменениями]
Параллельные тексты EN-RU
The Agilon VX line-interactive UPS is a best value product designed for PCs, laptops, and POS equipment used in home offices and small businesses.
[Delta Electronics]Линейно-интерактивный ИПБ Agilon VX600 является одним из лучших источников для бесперебойного питания персональных компьютеров и терминалов розничной торговли в домашних офисах и малом бизнесе.
[Перевод Интент]
Is it important that UPS include a Voltage Regulator?
Definitively. When the AC Line voltage is not suitable for your PC the UPS uses internal batteries to supply appropriate power to your PC. If the UPS does not include a Voltage Regulator this range is rather narrow but when UPS includes Voltage Regulator this range can be quite wide because most of the variations can be managed by the stabilization system and consequently the use of the batteries is less frequent. Evidently the less the UPS uses the batteries the longer life they will have.
Batteries Life Expectancy in an UPS including Voltage Regulator (Called Interactive UPS or In-Line UPS) is about 3 years, while batteries in an UPS not including Voltage Regulator (Off Line UPS) usually do not last longer than a year. Nevertheless end users rarely realize their batteries are loosing properties since the back up time can only be measured during actual blackouts and then it could be too late.
[ http://www.integra-ups.com/am/en/soporte/preguntas.htm]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > линейно-интерактивный источник бесперебойного питания
20 communication/ message facilities
pl.оборудование, обеспечивающее связь и обмен сообщениями ( между оператором станка и ЭВМ устройства ЧПУ в диалоговом режиме работы)Англо-русский словарь промышленной и научной лексики > communication/ message facilities
СтраницыСм. также в других словарях:
Устройства сигнализации — Устройства сигнализации, централизации и блокировки Помещение релейной на посту электрической централизации Устройства сигнализации, централизации и блокировки совокупность технических средств, используемых для обеспечения безопасности и… … Википедия
коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК — коэффициент перерегулирования устройств АРУ Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в … Справочник технического переводчика
Коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК — 87. Коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК Коэффициент перерегулирования устройств АРУ D. Uberregelungsgrosse Е. Overregulation rate F. Taux de reajustage Отношение максимального… … Словарь-справочник терминов нормативно-технической документации
Коэффициент перерегулирования устройства автоматического регулирования усиления системы передачи с ЧРК — 1. Отношение максимального отклонения уровня передачи сигнала электросвязи, имеющего место при неустановившемся режиме работы устройства автоматического регулирования усиления по току контрольной частоты в линейном или групповом тракте системы… … Телекоммуникационный словарь
Устройства сигнализации, централизации и блокировки — Стиль этой статьи неэнциклопедичен или нарушает нормы русского языка. Статью следует исправить согласно стилистическим правилам Википедии … Википедия
Устройства СЦБ — Устройства сигнализации, централизации и блокировки совокупность технических средств, используемых для обеспечения безопасности и регулировки движения поездов. На магистральном транспорте Российских железных дорог приняты самые жёсткие в мире… … Википедия
Устройства сбора и передачи данных — (УСПД) – многофункциональные устройства, работающие в автоматическом режиме в составе АСКУЭ субъекта оптового рынка, осуществляющие прием, обработку, хранение, отображение (необходимость определяется проектом) информации от счетчиков… … Коммерческая электроэнергетика. Словарь-справочник
ГОСТ 23769-79: Приборы электронные и устройства защитные СВЧ. Термины, определения и буквенные обозначения — Терминология ГОСТ 23769 79: Приборы электронные и устройства защитные СВЧ. Термины, определения и буквенные обозначения оригинал документа: 39. π вид колебаний Ндп. Противофазный вид колебаний Вид колебаний, при котором высокочастотные напряжения … Словарь-справочник терминов нормативно-технической документации
режимы работы — 3.3 режимы работы (machine modes of operation): вид команды ЧПУ: a) «Ручное управление»: Неавтоматический режим работы станка с ЧПУ, при котором оператор управляет им без применения предварительно запрограммированных числовых данных, например… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50571.21-2000: Электроустановки зданий. Часть 5. Выбор и монтаж электрооборудования. Раздел 548. Заземляющие устройства и системы уравнивания электрических потенциалов в электроустановках, содержащих оборудование обработки информации — Терминология ГОСТ Р 50571.21 2000: Электроустановки зданий. Часть 5. Выбор и монтаж электрооборудования. Раздел 548. Заземляющие устройства и системы уравнивания электрических потенциалов в электроустановках, содержащих оборудование обработки… … Словарь-справочник терминов нормативно-технической документации
ТСН 2001.5-1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства — Терминология ТСН 2001.5 1: Территориальные сметные нормативы для Москвы. Глава 5. Пусконаладочные работы. Сборник 1. Электротехнические устройства: Агрегат Совокупность нескольких механизмов (не менее двух, работающих в комплексе и обеспечивающих … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский